
Published in Nature Communications, the new algorithm from Nanyang Technological University, Singapore (NTU Singapore), and Japan’s Osaka University and Hiroshima University is claimed to represent a significant advance in swarm robotics. Potential applications include disaster relief, search-and-rescue missions, and infrastructure inspection.
Cyborg insects are insects equipped with electronic devices on their backs – including sensors, a battery, and an antenna - that allow their movements to be remotely controlled.
The control of a single cyborg insect was first demonstrated by Professor Hirotaka Sato from NTU Singapore’s School of Mechanical and Aerospace Engineering in 2008.
However, a single insect is insufficient for operations such as search-and-rescue missions, where earthquake survivors are spread out and there is an optimal 72-hour window for locating them.
In 2021 and 2024, Prof Sato and his partners from Singapore’s Home Team Science & Technology Agency (HTX) and Klass Engineering and Solutions demonstrated how cyborg insects may be used for search and rescue operations in future.
This latest paper on the new swarm system uses a leader-follower dynamic, where one cyborg insect acts as a group leader guiding 19 others.
Related content
Co-corresponding authors of the paper, Professor Masaki Ogura from Hiroshima University and Professor Wakamiya Naoki from Osaka University, developed the swarm control algorithm and computer programmes, while NTU Professor Hirotaka Sato and his team prepared the cyborg insect swarm, implemented the algorithm on the insects’ electronic backpacks, and conducted the physical experiments in Singapore.
The scientists noted several benefits to their new swarm algorithm during lab experiments. Allowing the cyborg insects to move more freely reduced the risk of the cyborgs getting stuck in obstacles, and nearby cyborgs could also help free those stuck or flipped over.
How it works
Earlier research demonstrated control of a single cyborg or a group that was controlled by algorithms that provided detailed and complex instructions for individual insects, but this approach does not coordinate movement for a big group.
With the new method, the leader insect is appointed by the algorithm, then notified of the intended destination, and its control backpack coordinates with the backpack of others in the group to guide the swarm.
This so-called ‘tour leader’ approach allows the swarm to adapt dynamically, as the insects can assist each other to overcome obstacles.
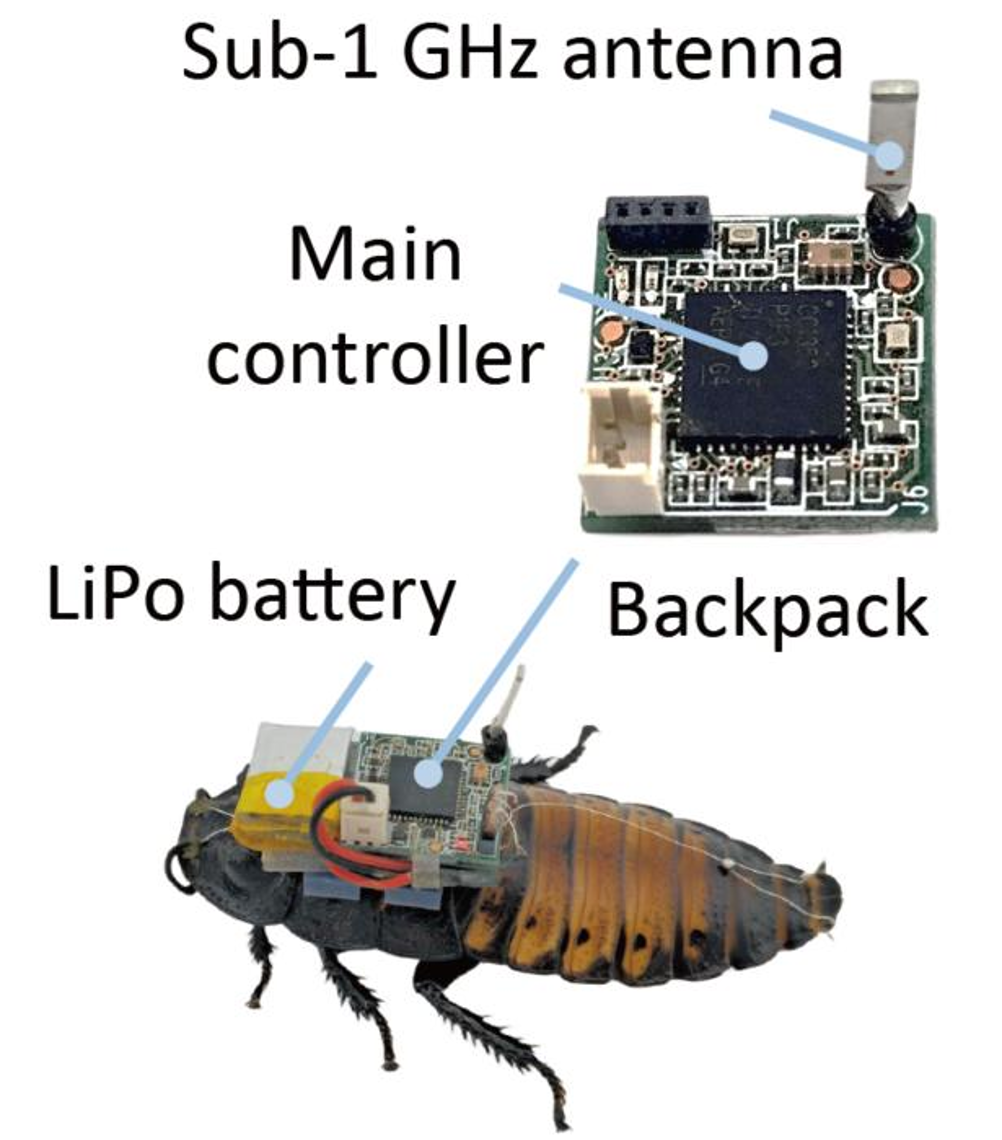
The team used Madagascar hissing cockroaches equipped with a lightweight circuit board, sensors and a rechargeable battery that forms an autonomous navigation system that helps them navigate their surroundings and nudges them towards a target.
These cyborgs consume significantly less energy than traditional robots, which rely on power-intensive motors for movement. The insect’s legs provide the locomotion needed to move the backpack, as the backpack nudges the insect by applying electrical stimulations, guiding it towards a particular direction.
When combined with the swarm control algorithm, the insects’ instincts enable them to navigate complex terrains and respond rapidly to environmental changes.
In experiments, the new algorithm reduced the need to nudge the insects by about 50 per cent compared to earlier approaches, which allowed the insects to have more independent navigation over obstacles and for resolution of issues including insects becoming stuck or trapped.
NTU Prof Hirotaka Sato said the technology is envisioned to be helpful in search and rescue missions, infrastructure inspection, and environmental monitoring, where narrow spaces and unpredictable conditions render conventional robots ineffective.
“To conduct search and inspection operations, large areas must be surveyed efficiently, often across challenging and obstacle-laden terrain. The concept involves deploying multiple swarms of cyborg insects to navigate and inspect these obstructed regions. Once the sensors on the backpack of a cyborg insect detect a target, such as humans in search-and-rescue missions or structural defects in infrastructure, they can wirelessly alert the control system,” Prof Sato said in a statement.
The joint team next aims to develop algorithms that enable coordinated swarm actions beyond simple movements, such as collaboratively transporting large objects.
They also plan to conduct experiments in outdoor environments to validate the algorithm’s effectiveness in more complex and real-world scenarios.



Deep Heat: The new technologies taking geothermal energy to the next level
No. Not in the UK. The one location in the UK, with the prospect of delivering heat at around 150°C and a thermal-to-electrical efficiency of 10-12%,...