
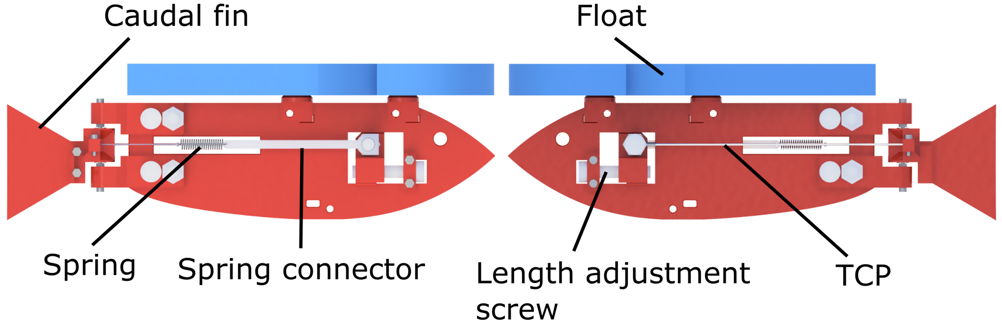
The Bristol team equipped their robot fish with a twisted and coiled polymer (TCP), a light-weight low-cost device that uses temperature change to generate movement, contracting like a muscle when an electrical current is applied. By minimising the distance between the TCP on one side of the robot fish and the spring on the other, this activates the fin at the rear, enabling the robot fish to reach new speeds.
Related content
“Twisted and coiled polymer (TCP) actuator is a promising novel actuator, exhibiting attractive properties of light weight, low-cost high energy density and simple fabrication process,” said Lead author Tsam Lung You from Bristol’s Department of Engineering Mathematics.
“They can be made from very easily accessible materials such as a fishing line and they contract and provide linear actuation when heated up. However, because of the time needed for heat dissipation during the relaxation phase, this makes them slow.”
By optimising the structural design of the TCP-spring antagonistic muscle pair and bringing their anchor points closer together, it allowed the posterior fin to swing at a larger angle for the same amount of TCP actuation. During tests, the undulating flapping of the rear fin on thre Bristol team’s fish was measured at a frequency of 2Hz, enabling speeds not seen before with this type of actuator.
“Our robotic fish swam at the fastest actuation frequency found in a real TCP application and also the highest locomotion speed of a TCP application so far,” explained Tsam Lung You. “This is really exciting as it opens up more opportunities of TCP application in different areas.”
The team’s paper, ‘Robotic Fish driven by Twisted and Coiled Polymer Actuators at High Frequencies’ will be presented at the 6th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2023). They are also now planning to expand the scale of the project and develop a knifefish-inspired TCP-driven ribbon fin robot that can swim agilely in water.



Radio wave weapon knocks out drone swarms
Have they tested the effectiveness of the system against the new generation of fibre-optic guided drones now being deployed by both side in the war in...